
GNSS-Aを用いて観測された海底の位置の時系列データです。(研究者向けです)
地震時変動や地震後変動の補正は実施していません。
地心地球固定座標系・平面直交座標系それぞれのデータがあります.適切な座標系を選択してご使用ください。
※論文等に利用される場合は、当文献[Scientific Data]を引用するようにお願いします。
※データの詳細についてもこの論文をご参照下さい。
| 地点名 | 地点名 | 地点名 | 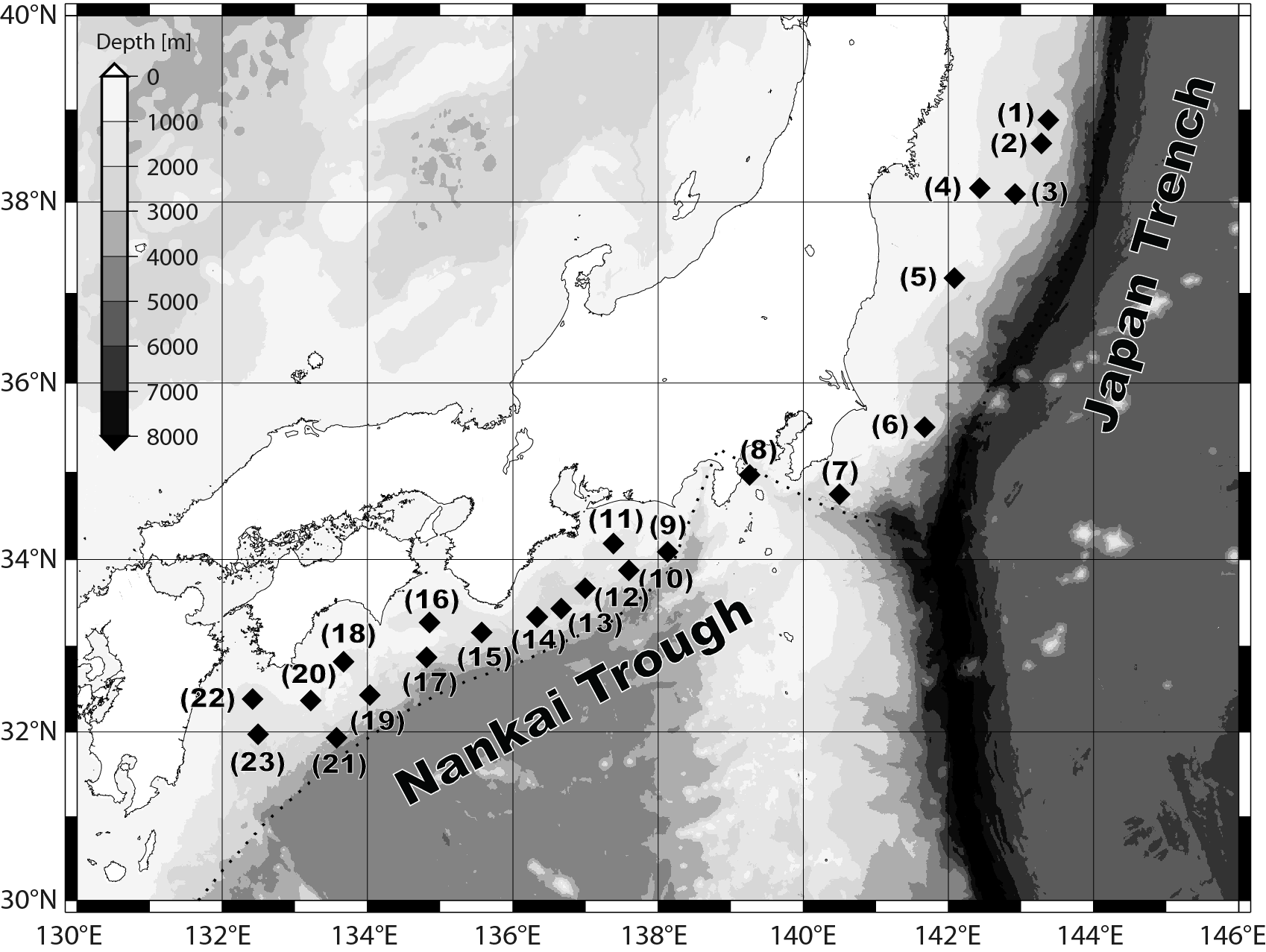 |
|||
| (1) | KAMN | (9) | TOK1 | (17) | MRT2 | |
| (2) | KAMS | (10) | TOK2 | (18) | TOS1 | |
| (3) | MYGI | (11) | TOK3 | (19) | TOS2 | |
| (4) | MYGW | (12) | KUM1 | (20) | ASZ1 | |
| (5) | FUKU | (13) | KUM2 | (21) | ASZ2 | |
| (6) | CHOS | (14) | KUM3 | (22) | HYG1 | |
| (7) | BOSN | (15) | SIOW | (23) | HYG2 | |
| (8) | SAGA | (16) | MRT1 |
| 最新のデータ | 2018/10/31 |
| 東北地震前の(1)-(6) | 2017/03/31 |
| 東北地震時の(1)-(6) | 2017/03/31 |
データ更新履歴
| 2018/10/31 |
| 2018/09/04 |
| 2018/07/18 |
| 2018/01/17 |
xyzデータのフォーマット
国土地理院のGEONET F3解 (ITRF2005) に準拠した座標系で求めた座標値を地心地球固定座標系(X, Y, Z軸方向が正)に変換しており、下記のフォーマットで定義された値が書かれています。
| 1行目 | データのバージョン(日付) |
| 2行目 | 観測点,基準となる座標系 |
| 3行目 | 各パラメータの説明 |
| 4行目以降 | 観測開始日, X[m], Y[m], Z[m], 観測手法(A:-2002/07, B:-2008/04, C:2008/04-), 観測した船(K:海洋, M:明洋, S:昭洋, T:拓洋), 観測終了日 |
enuデータのフォーマット
国土地理院のGEONET F3解 (ITRF2005) に準拠した座標系で求めた座標値を平面直交座標系(東方、北方、上方が正)に変換しており、下記のフォーマットで定義された値が書かれています。
| 1行目 | データのバージョン(日付) |
| 2行目 | 観測点,基準となる座標系 |
| 3行目 | 平面直交座標系の原点(緯度, 経度, 楕円体高) |
| 4行目 | 最初の観測エポックにおける海底の基準点位置 |
| 5行目以降 | 観測開始日, 東方[m], 北方[m], 上方[m], 観測手法, 観測した船, 観測終了日 |
東北地震時のデータのフォーマット
xyzデータ,enuデータのそれぞれの移動量は, ともに上記のフォーマットに即した値になっています。
| 1-3行目 | ヘッダー |
| 4行目 | 観測点名, 地震前の観測日, 観測した船, 地震後の観測日, 観測した船, その間の移動量 |
利用上の留意点
偶発的な誤差要因による繰り返し測位の不確かさは、水平方向で概ね 1σ で 2-3 cm と経験的に見積もられていますが、海中の水温擾乱等による除去できない系統的な誤差により、それ以上のずれが生じることがあります。
また、鉛直方向の不確かさは、水平方向とくらべ 2~3 倍程度悪化します。
データの解析・分析手法は研究開発段階のため、今後の手法の改良により結果が変化することがあります。あらかじめご了承下さい。
解析には国土地理院提供の電子基準点の1秒データ及びF3解を利用しています。
観測に関しての詳しい情報はこちらをご覧下さい。
※English page →HP