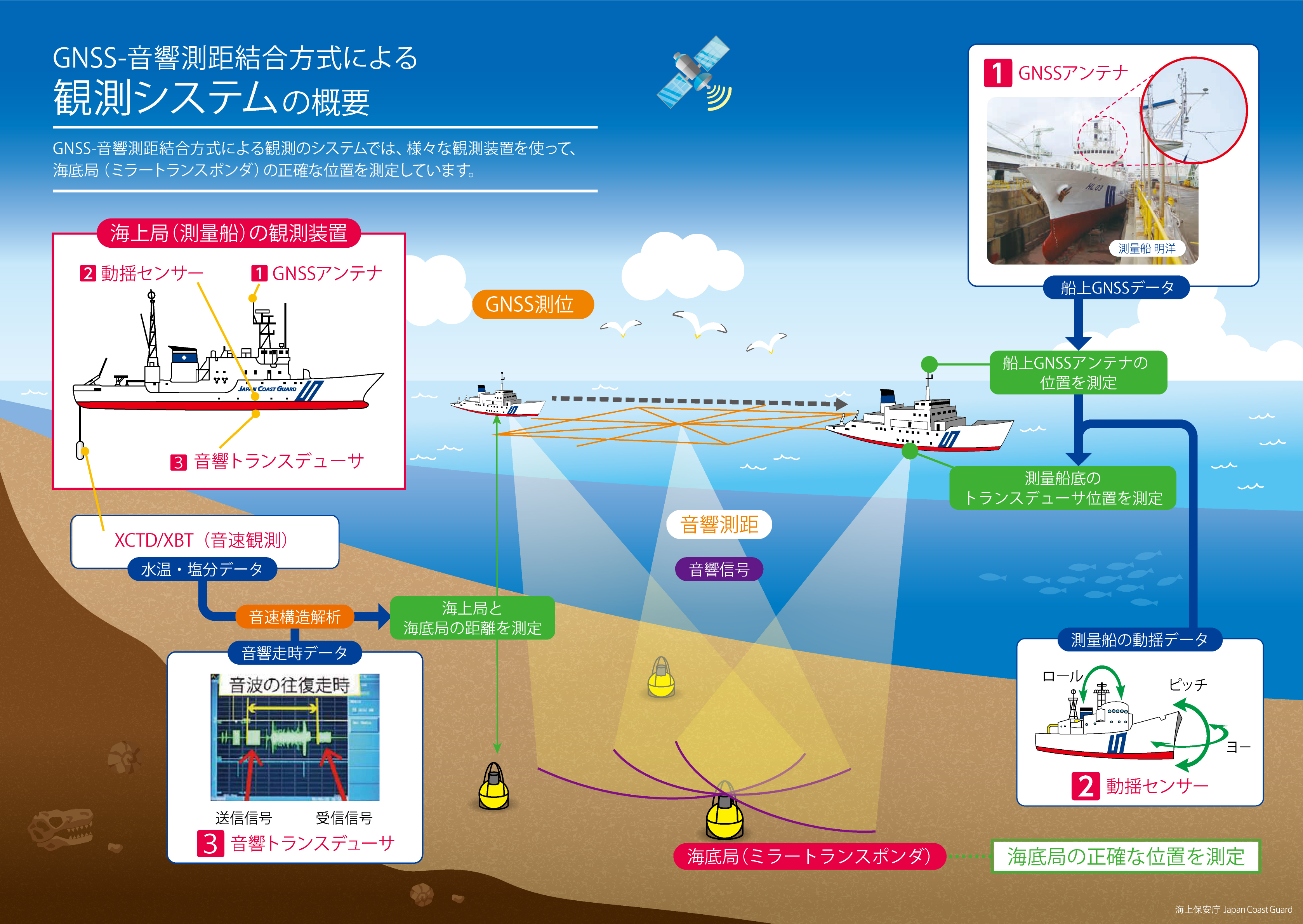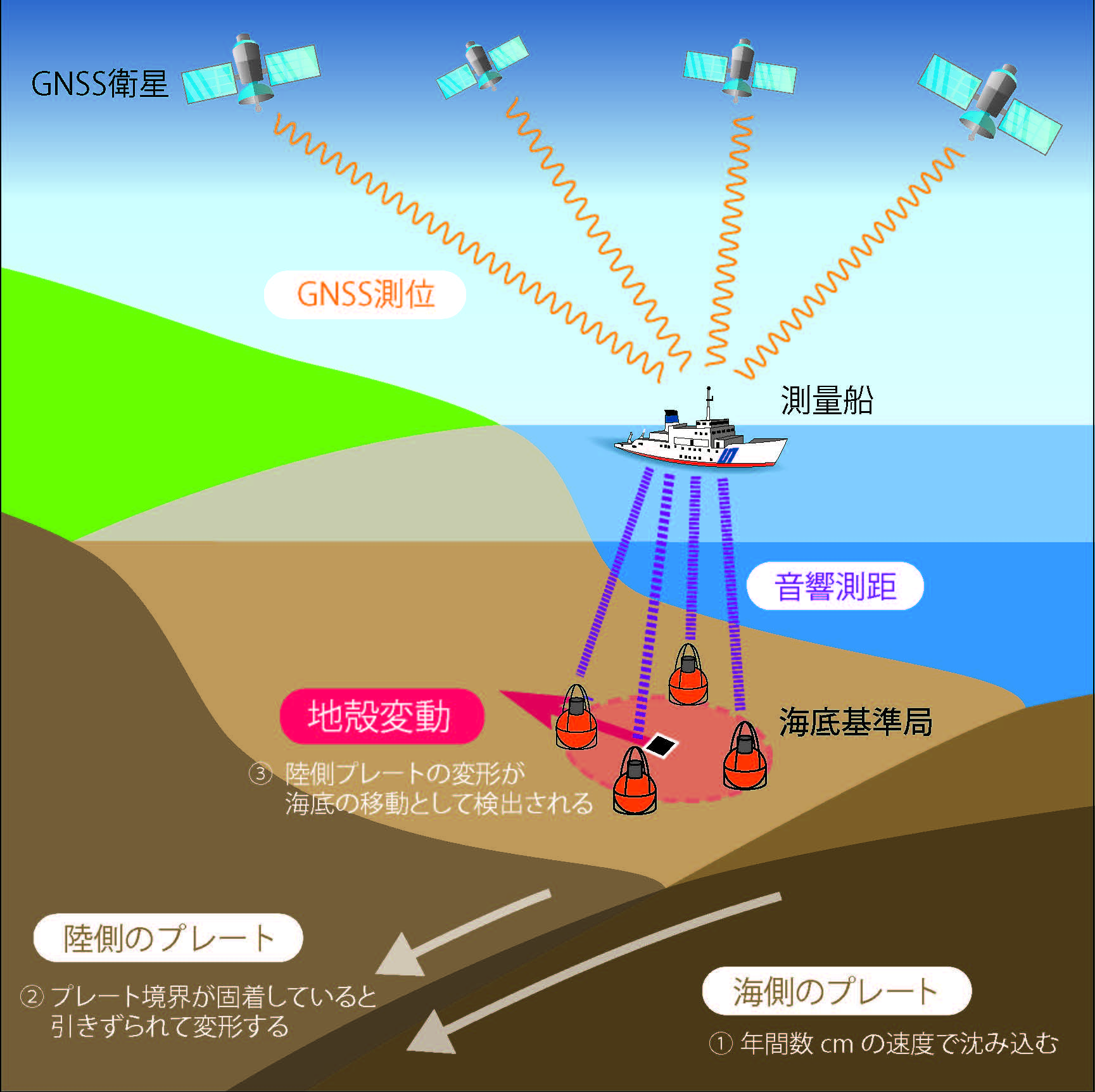
図1 海底地殻変動観測の概念
陸上では、GNSSの普及により、地殻変動観測が広く、かつ密に行われています。しかし、海底での地殻変動観測は技術的に難しく、これまでほとんど実施されてきませんでした。
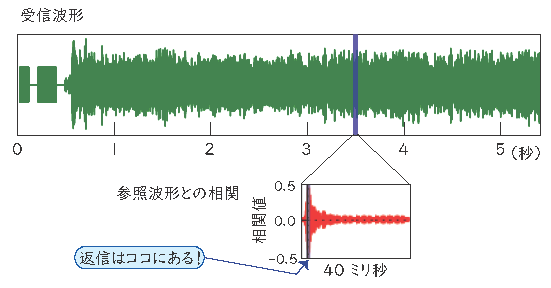
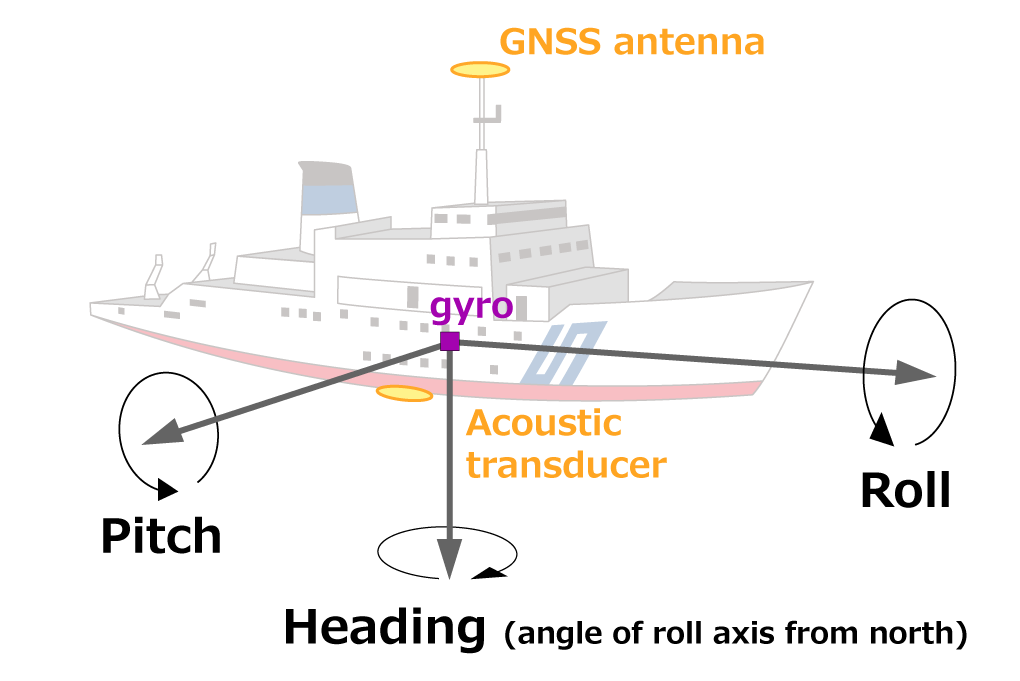
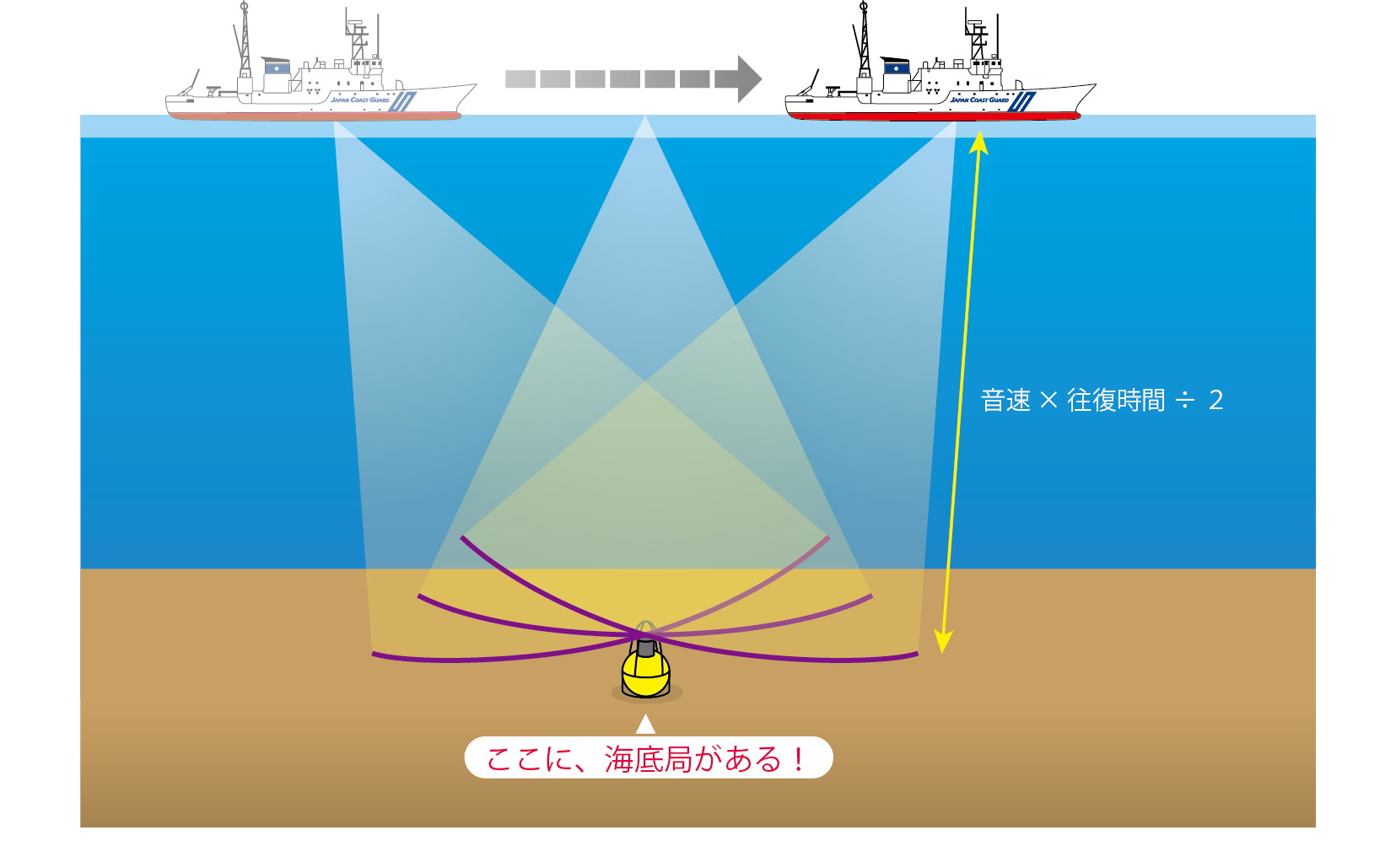
例えば、GNSSの電波や光は海底までは届きませんので、ある海底の地点の位置を決定するためには、測量船を介して、GNSSで測量船の位置を決定する(GNSS測位)とともに、 音波で測量船と海底の点との距離を測る(音響測距)、というように電波と音波を組み合わせた複雑な観測システムが必要です。 音響測距では、測量船―海底間の音波の往復伝搬時間から距離を求めます。そのためには海中の音速度(音波の伝わる速さ)を知ることが必要ですが、 この音速度は水温や塩分濃度によって変化します。時々刻々と変化する海中の音速度を、時間的・空間的に正確に把握することはかなり困難です。
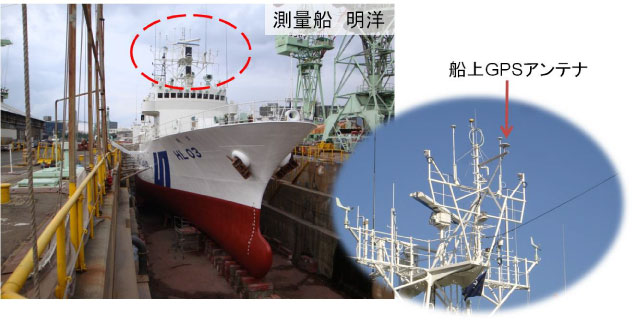
このような状況の中で、海上保安庁では、「GNSS測位」と「音響測距」を結合した手法による海底地殻変動観測システムを構築し、 更なる技術開発・海底基準点の展開及び観測を実施しています(図1)。
この観測手法のアイデアは、オリジナルには米国カリフォルニア大学サンディエゴ校にあるスクリップス海洋研究所のSpiess教授によるものです。