
GNSS-音響測距結合方式による海底地殻変動観測
陸上では、GNSSの普及により、地殻変動観測が広く、かつ密に行われています。しかし、海底での地殻変動観測は技術的に難しく、これまでほとんど実施されてきませんでした。
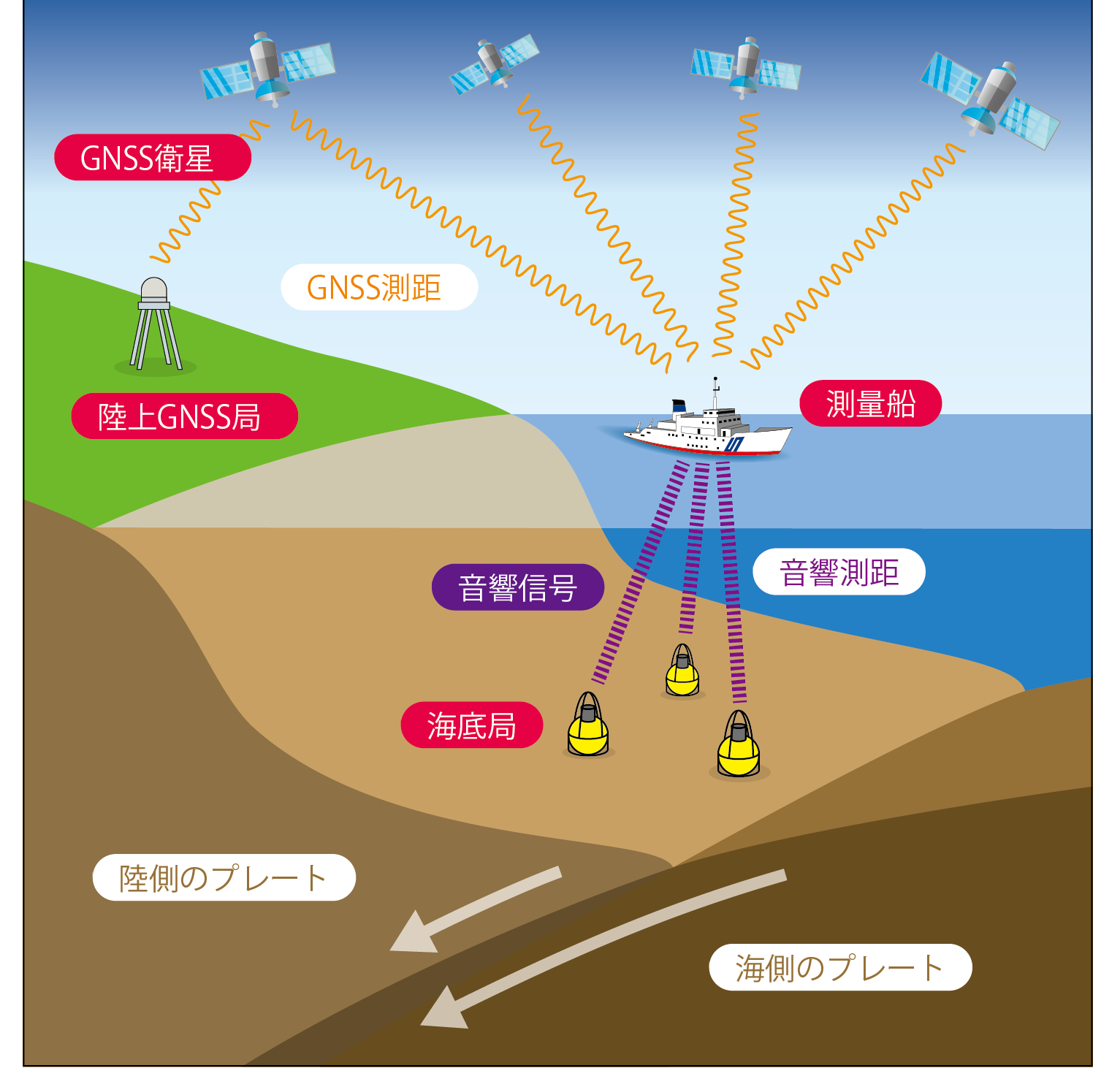
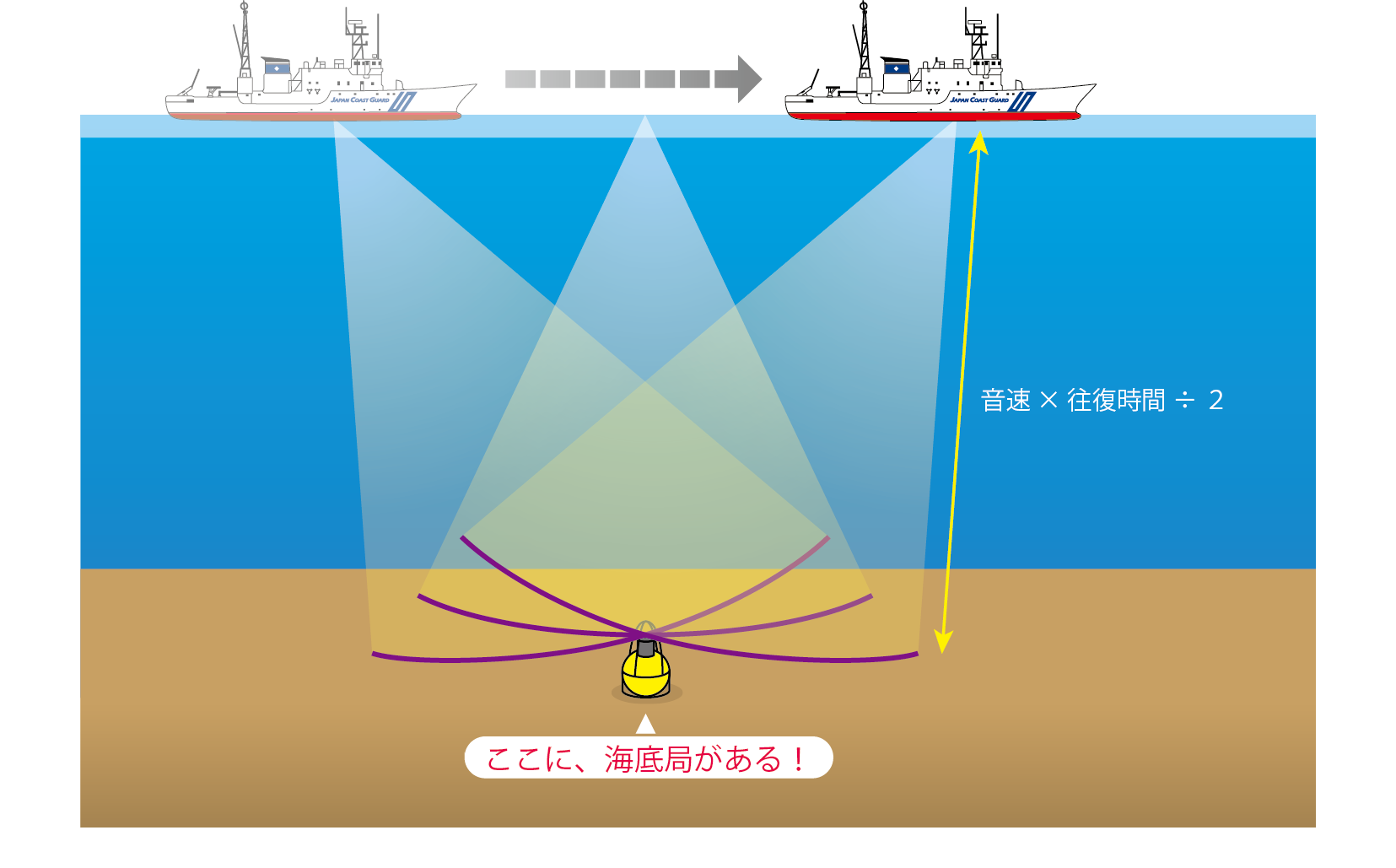
例えば、GNSSの電波や光は海底までは届きませんので、ある海底の地点の位置を決定するためには、測量船を介して、GNSSで測量船の位置を決定する(GNSS測位)とともに、 音波で測量船と海底の点との距離を測る(音響測距)、というように電波と音波を組み合わせた複雑な観測システムが必要です。 音響測距では、測量船―海底間の音波の往復伝搬時間から距離を求めます。そのためには海中の音速度(音波の伝わる速さ)を知ることが必要ですが、 この音速度は水温や塩分濃度によって変化します。時々刻々と変化する海中の音速度を、時間的・空間的に正確に把握することはかなり困難です。
このような状況の中で、海上保安庁では、「GNSS測位」と「音響測距」を結合した手法による海底地殻変動観測システムを構築し、 更なる技術開発・海底基準点の展開及び観測を実施しています(図1)。
この観測手法のアイデアは、オリジナルには米国カリフォルニア大学サンディエゴ校にあるスクリップス海洋研究所のSpiess教授によるものです。
 |
観測システム
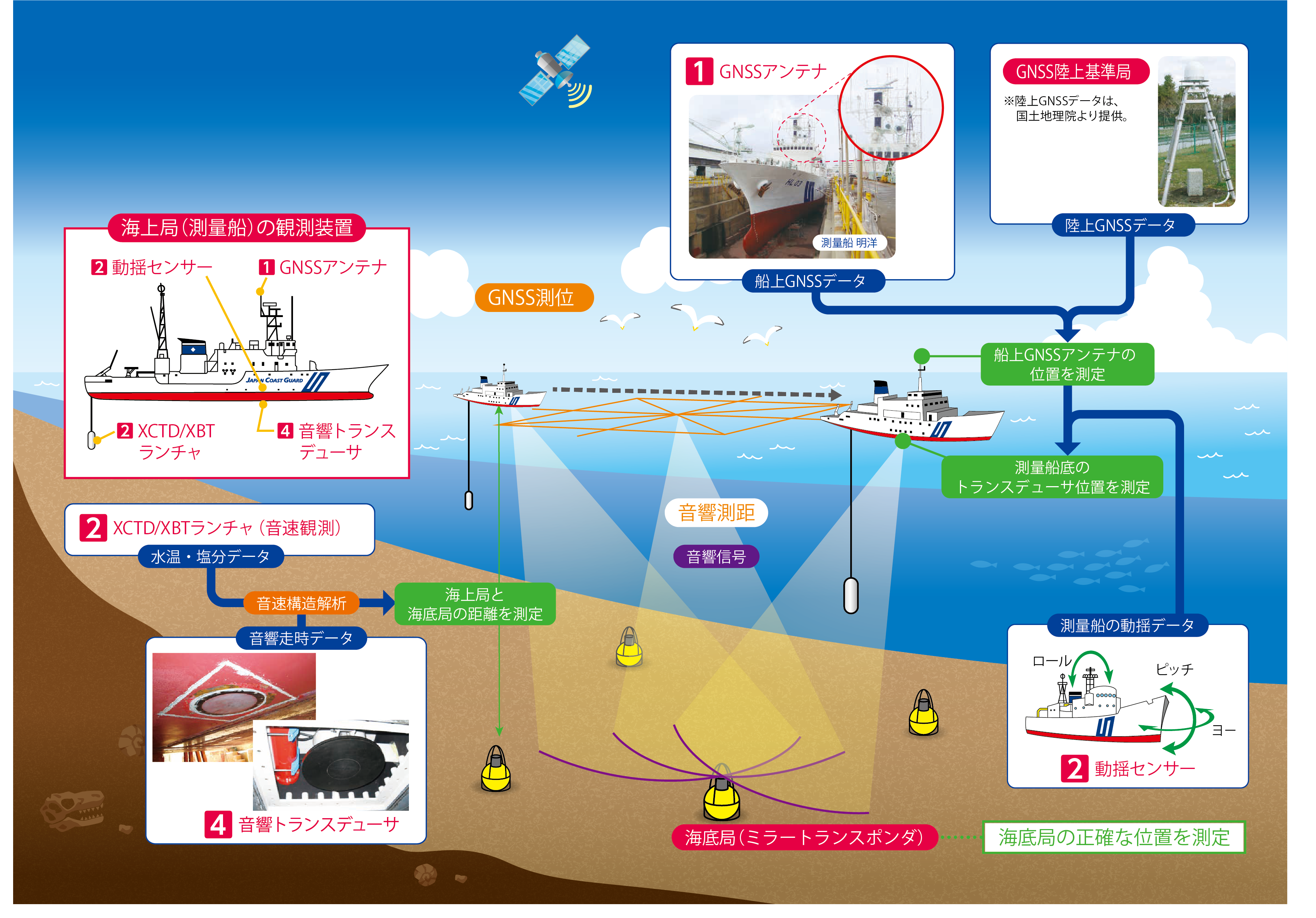
音響測距観測のシステムは、図2のようになっています。各観測点には、その海域の水深程度の範囲に広げて複数の海底局を設置しています。その海域で測量船を用いて観測を行います。 観測や機器の詳細については、次節の「観測の流れ」をご覧ください。
 |
観測の流れ
観測では、各海底基準点に、その海域の水深程度の範囲に広げて設置した海底局の位置を求めます。個々の海底局の位置決定は、下に示したフローチャートに沿って行われます。
GNSS衛星と海底局との位置関係を知るために、中継点として測量船を介し、陸上基準点-測量船間の位置決定を行う「GNSS測位」(図の右側部分)と、 測量船-海底局間の距離測定を行う「音響測距」(図の左側部分)とを同時に行います。 測量船に関して複数の地点(実際は数千)でこれらの観測を行うことで、陸上基準点-海底局間の高精度での位置決定ができます。
図2の最下部は、実際の測定作業で、陸上GNSS観測以外の測定は全て測量船で行います。 この測定作業で得たデータを持ち帰って解析することによって、海底地殻変動観測に必要な情報を抽出します。
![]()
![]()
![]()
![]()
(音波走時)
(音速度構造)
(GNSSアンテナ位置)
![]()
![]()
![]()
![]()
(青い字をクリックすると各項目の説明に跳びます)
測定について
音響測距観測
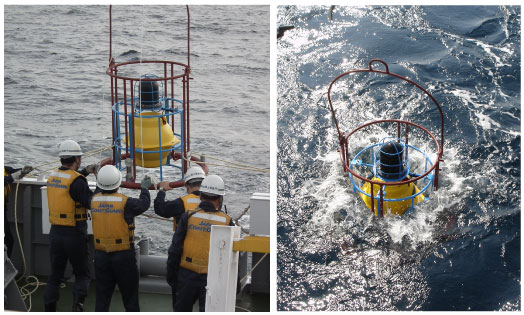
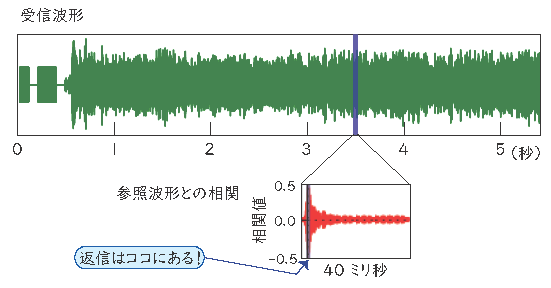
海中ではGNSS電波が到達しないため、音波による測距観測を行います。海底局はミラートランスポンダ(図3)で、 測量船の船底に装備した音響トランスデューサから発信される音響信号を受信し、約1秒後にそのまま送り返す機能を持っています。 海底から返ってきた音響信号を船底トランスデューサで捉え、記録します(図4)。
各海底基準点には、安定した観測結果を得るため、複数の海底局が設置されています。これらの海底局を区別するために、それぞれ異なる識別信号を設定しています。 音響信号には、M系列というコード化されたパルス信号のビットに応じて搬送波(10kHzの正弦波)を位相変調させたものを使用しています。
海底局はバッテリーで稼動しているので、長期間の観測においては海底局の更新作業が必要になります。 その際は、新旧両方の海底局の位置測定を一定期間行い、投入に伴う新局の位置のずれを測定することで連続的な観測データを得られるようにしています。
 |
 |
音響信号について
音響トランスデューサについて
海底局の更新について
→ 「フローチャート」に戻る
水温・塩分測定
音響測距による音波の伝搬時間から測量船と海底局間の距離を求めるためには、海中の音波速度を精密に知ることが重要です。 この音波速度は、海水の温度や塩分濃度によって大きく変化します。 そのため、観測中に複数回、CTD観測やXBT観測、XCTD観測を行って深さ方向の温度・塩分濃度プロファイルを取得します。
図5は、CTD観測の様子です。CTD観測では、ワイヤーでつないだ機器を、クレーンを使って海中に沈め、温度・塩分濃度・水深を測定します。 精度良く測定できるのですが、音響測距中の測定はできません。 測距中の測定は、投下式のXBT・XCTD観測で行います。XBT観測は比較的安価に行えますが、塩分濃度が測れないので、状況に応じて使い分けて測定しています。
 |
→ 「フローチャート」に戻る
音速解析
CTD、XBT、XCTD観測で得られた温度・塩分濃度プロファイルを、Del Grossoの経験式を用いて音速度に換算します。 前述したように、XBT観測では塩分濃度は測定できませんので、その前後に行ったCTDあるいはXCTD観測の結果を用いて推定しています。
さらに詳しく
投下式機器の深度換算について
→ 「フローチャート」に戻る
船の動揺計測
動揺計測装置を用いて、常に波に揺られ続ける測量船の傾きを計測しています。船の傾きは図6のように3種類の回転で記述されます。前後を軸にした回転「ロール」、 左右を軸にした回転「ピッチ」、上下を軸にした回転「ヨー」です。これらの回転を把握することによって、GNSSアンテナのあるマストに対する音響トランスデューサの正確な位置が決定でき、 音響信号の送受信源の位置を正確に決定することができます。
 |
→ 「フローチャート」に戻る
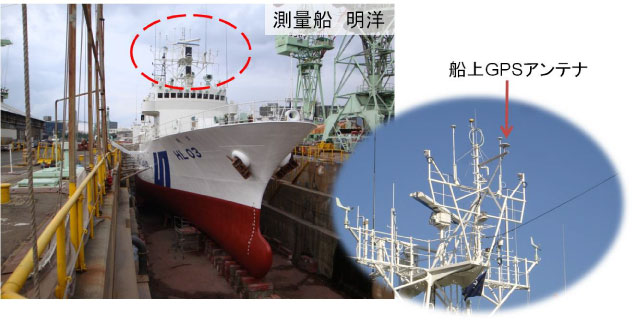
船上GNSS観測
GNSS衛星と海底局とをつなぐ中継点である測量船の位置を決定するため、測量船のマストにGNSSアンテナが設置されています(図7)。 観測は0.5秒サンプリングで行っています。また、人工衛星の軌道を考慮して、測量船の位置決定精度が悪くなるときには音響測距観測を一時中断します。
 |
→ 「フローチャート」に戻る
解析について
音響解析
理論上の送信波形と取得した受信波形を相関処理することによって、音波が測量船のトランスデューサと海底局を往復する時間を算出します。
一つの海底基準点において数1000回分の音響データを収録して解析します。
 |
音響解析について
→ 「フローチャート」に戻る
GNSS解析
GNSS陸上基準局に対する船上のGNSSアンテナの位置を、キネマティック測位技術で0.5秒ごとに求めます。 このハイレートGNSS観測の精度は、海底局の位置決定精度に直に影響しますので、できる限り高精度かつ安定した測位結果を得る必要があります。
海底地殻変動観測では、観測海域が陸から遠く離れていることがほとんどですので、長距離基線の解析が必要となります。 そのため、長基線解析を高精度に行うためにNASA/GSFCで開発されたソフトウェア“IT”(Interferometry Trajectory)を利用しています。 “IT”は、長基線で顕在化する誤差要因を取り除くための技術が取り入れられています。
GNSS解析について
→ 「フローチャート」に戻る
局位置解析
音響測距で求めた船上局-海底局間の距離と、GNSS測位で求めた船上局の陸に対する位置とを結合し、陸上基準点に対する海底局の位置を精密に決定します。 一つの海底局に対して複数回の測距を行い、各測距観測と同時に得たGNSSデータから、海中音速度も未知数として最小二乗法を用いて海底局の位置を決定します(図11)。 ですので、測距回数(すなわち、音響信号の送受信回数)が多いほど位置決定精度は良くなります。通常、この測距は一つの海底局に対して約1300回行っています。
もちろん、時間的にも空間的にも大きく変化していく海の様子を観測のみによって正確に把握することは困難です。 そこで実際の局位置解析では、観測データを基にしつつ、音速度構造も未知数として扱い、最適な解を求めることで位置決定を高精度で行えるようにしています。 この音速度構造の正確な推定が、海底局の位置を決定する上で非常に重要な課題となっています。
 |
局位置解析手法について
音速度構造の影響について
→ 「フローチャート」に戻る
→ 「成果」に進む